

Repeatability of local reference frames for surface matching
Surface matching deals with the ability of finding similarities between 3D surfaces and is a key task in scenarios such as 3D object recognition and surface registration. Last decade research on surface matching has been mainly focused on local rather than global approaches, for the former being able to withstand nuisances such as clutter, occlusions and missing regions. Hence, research efforts have addressed the definition of local 3D descriptors, that is compact representations of surface points based on the characteristics of their neighborhood. Invariance to objects’ pose is an indispensable trait of every 3D descriptor. Most authors achieve it by using descriptions based on invariant Local Reference Frames (LRF) and on the description of the support with respect to such LRF coordinates. As long as the LRF turns out repeatable and robust to noise, the descriptor holds the potential for high distinctiveness since it can encode all the shape information within the support.
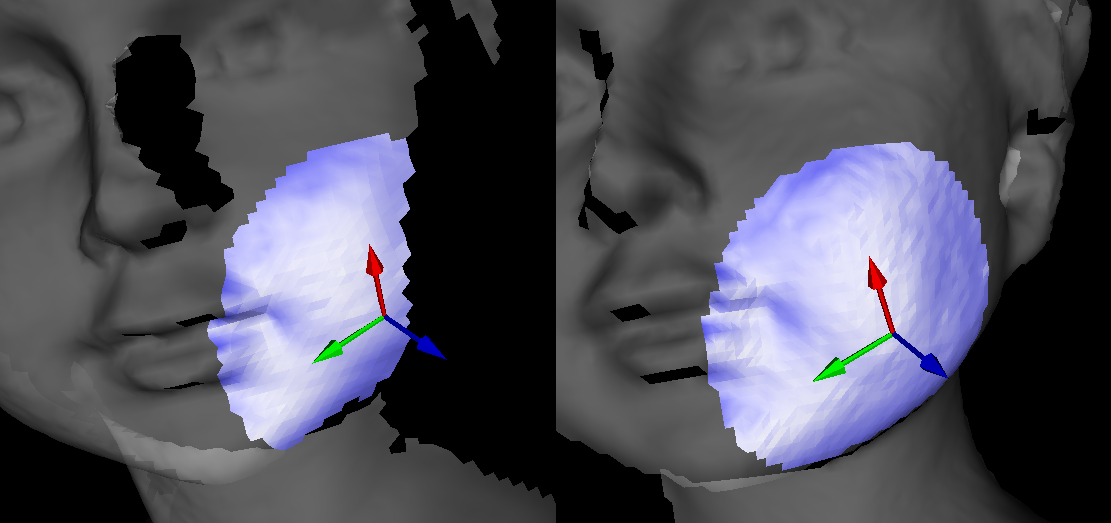
Accordingly, in [1] and [2] we propose an extensive benchmark study whose purpose is to analyze and compare the repeatability of existing LRF proposals in partial shape matching and object recognition scenarios, so as to elucidate on the methods most appropriate to these important tasks. Furthermore, we introduce two novel algorithms, referred to as BOARD [1] and FLARE [2], for the computation of LRFs. Our evaluation on a large corpus of datasets shows as FLARE exhibits the highest repeatability as well as a computational time comparable to those of the fastest (but dramatically less repeatable) methods.
Datasets
It is possible to download the datasets used for the experimental evaluation in [1] and [2].
Shape registration datasets
Every ZIP archive contains a set of partial views in PLY format and a groundTruth.txt file with the 4x4 rototranslation matrices which align every partial view against the full registered model.
Stanford 3D Scanning Repository:
The datasets are provided courtesy of their owners by the AIM@SHAPE Shape Repository and are distributed under the AIM@SHAPE license.
- Glock (8 views - 7 MB - owner: UU)
- Fish (10 views - 8 MB - owners: IMATI, CNR)
- Amphora (14 views - 13 MB - owners: CNR, IMATI)
- Neptune (15 views - 22 MB - owners: IMATI, INRIA)
- Buste (16 views - 3 MB - owner: UU)
- Dancing Children (26 views - 36 MB - owner: INRIA)
Space time stereo:
The datasets have been acquired by a Space Time Stereo setup [5,6] and are released under the Creative Commons 3.0 Attribution License (CC-BY 3.0).
- FrogStereo (21 views - 28 MB)
- MarioStereo (18 views - 22 MB)
- SquirrelStereo (18 views - 16 MB)
Kinect:
The datasets have been acquired by a Kinect V1 sensor and are released under the Creative Commons 3.0 Attribution License (CC-BY 3.0).
- FrogKinect (20 views - 14 MB)
- MarioKinect (13 views - 4 MB)
- SquirrelKinect (15 views - 4 MB)
- DuckKinect (16 views - 10 MB)
Object Recognition datasets
Every ZIP archive contains a set of INI files (in the format Config##.ini) that describe each scene as: the number of models in the scene, the path of model PLY files, the path of model pose files, the path of scene file. Model poses are stored in XF files as 4x4 rototranslation matrices.
- Mian (5 models, 50 scenes - 19 KB) (It contains only INI files. Models, scenes and ground truth can be found at http://www.csse.uwa.edu.au/~ajmal/recognition.html)
- Kinect (6 models, 27 scenes - 138 MB)
- VCS (6 models, 300 scenes - 143 MB)
Code
We can freely distribute an implementation of our BOARD and FLARE methods proposed in [1] and [2] for Visual C++ environment. To obtain the code, please write to (alioscia DOT petrelli AT unibo DOT it) and we will provide to send it to you.
Moreover, an implementation of BOARD method is available in PCL library, whereas FLARE is going to be integrated. Nevertheless, a provisional (but fully-working) version of PCL integrating FLARE can be downloaded from here. The method is implemened by the FLARELocalReferenceFrameEstimation class.
Experimental Results
We make available the experimental results of the benchmark described in [2] among our and existing LRF proposals.
References
| [1] | A. Petrelli, L. Di Stefano, "On the repeatability of the local reference frame for partial shape matching", 13th International Conference on Computer Vision (ICCV), 2011. [PDF, supplementary material] |
| [2] | A. Petrelli, L. Di Stefano, "A repeatable and efficient canonical reference for surface matching", 3DimPVT, 2012. [PDF] |